

Ptáte se, co všechno zvládne jeden procesor v jednu chvíli? Vyzkoušeli jsme to na jednoduché aplikaci a zde jsou výsledky – demonstrační projekt spojující zpracování videa, řízení motorů a grafické zpracování aplikace včetně dotykového ovládání.
Vysoký výkon, obrovské množství hardwarových periferií, zpracování 2D i 3D obrazu, práce s HD videem, grafické rozhraní a mnoho dalšího najdeme u SABRE SD desky s aplikačním procesorem Freescale i.MX6Quad (Obr. 1). Vysoký výkon zaručují čtyři jádra ARM® Cortex®-A9 a DDR3 SDRAM paměť o velikosti 1GB. Deska disponuje až čtyřmi způsoby připojení displeje a umožňuje i připojení několika displejů současně. Mnoho z těchto výhod bylo použito právě pro projekt ovládání robotické ruky.
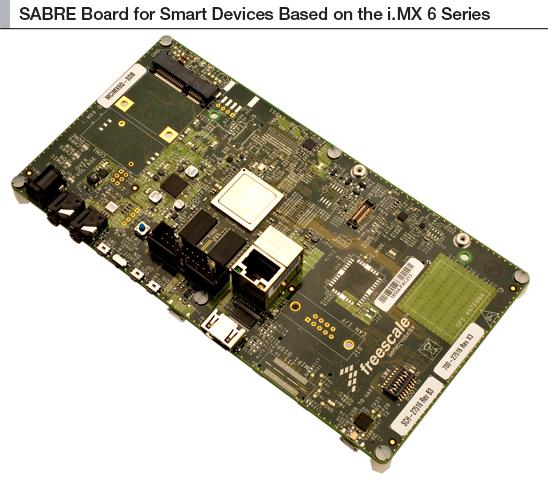
Obr. 1: SABRE SD deska od Freescale
Souhrn vlastností SABRE SD desky
Akcelerometr
- Procesor Freescale i.MX 6Quad 1GHz ARM Cortex-A9
- 1GB DDR3 SDRAM
- 8GB eMMC Flash
- 2x LVDS pro připojení displejů
- HDMI konektor
- Paralelní připojení LCD displeje
- MIPI DSI pro připojení displeje
- Audio kodeky
- 2x digitální mikrofon
- 2x 3,5mm audio jack
- mPCIe konektor
- 2x SD/MMC slot na kartu
- SATA konektor
- 10/100/1000 Ethernet
- USB 2.0 OTG (micro USB)
- JTAG konektor
- USB 2.0 debugovací port
Robotická ruka
Robotická ruka byla zakoupena od společnosti Lynxmotion a ovládá se přes sériový port jednoduchými příkazy, které se skládají z čísla serva, nastavení pozice serva a dobou nastavení serva do dané pozice.
Těchto příkazů je možné poslat několik za sebou nebo je kombinovat tak, aby se nastavovalo několik serv současně.
Vlastní projekt
Z pohledu hardwaru je propojena SABRE SD deska s robotickou rukou pomocí převodníku z USB na sériový port. Dále je k desce připojena webová kamera podporující standard UVC (Universal Video Class), myš, klávesnice a dva video výstupy. Jedním je LVDS, ke kterému je připojen 10“ dotykový displej a druhý je HDMI, kam je připojen monitor. Vše je naznačeno blokově na obrázku 2.

Obr. 2: Blokové schéma zapojení všech součástí
Celé zařízení je ovládáno programem, který je uložený na SD kartě. Spolu s ním je na kartě uložený i celý operační systém a zavaděč systému. Deska běžně podporuje dva operační systémy – Linux a Android.
V tomto projektu byl zvolen OS Linux Yocto, který byl zkompilován přesně pro tuto desku i s přidanými ovladači pro USB převodník a webovou kameru. Navíc byly přidány balíčky pro Qt4 a OpenCV. Zároveň byl použit zavaděč U-Boot pro spuštění systému, kde bylo nutné nastavit použití dvou zobrazovacích jednotek.
Program
Program je napsaný v jazyce C++ a byly použity knihovny pro grafické zobrazení Qt4 a pro práci s obrazem OpenCV.
V programu je možné se přepínat mezi několika režimy řízení robotické ruky. Prvním je manuální režim, který umožňuje nastavení každého serva zvlášť posuvníkem, jak je naznačeno na obrázku 3.

Obr. 3: Manuální režim
Obrázek 4 zobrazuje režim nastavení pozice. Na dotykovém displeji volíme pozici úchopu robotické ruky – na obrázku naznačeno červenou tečkou. Program přepočítá pozici úchopu na úhly jednotlivých serv. Takto je možné robotickou ruku ovládat mnohem snadněji.

Obr. 4: Režim nastavení pozice
Poslední režim ovládání je hra podobná „Člověče nezlob se!“. Hodí se kostkou a robotická ruka přesune figurku o hozený počet polí. Je možné házet dvěma způsoby. Prvním způsobem je elektronická kostka, která umožňuje i autonomní hru, kdy si program háže kostkou pomocí generátoru náhodných čísel stále dokola. Druhům způsobem je fyzická kostkoa, kterou sleduje webová kamera a pomocí jednoduchých funkcí z OpenCV spočítá počet teček na kostce. Také je možné ovládat posun figurky kliknutím na určité políčko na displeji (obr. 5).

Obr. 5: Hra „Člověče nezlob se!“
Zároveň při ovládání robotické ruky je možné přehrávat video na monitoru a to buď z kamery, nebo ze souboru popřípadě datového toku.
Závěr
Byla vytvořena aplikace, která ukazuje výkon procesoru i.MX6Quad a desky SABRE SD. Aplikace zvládá ve stejném čase snímat obraz z kamery, zpracovávat jej a reagovat na něj. Dále mezitím aplikace ovládá robotickou ruku po sériové lince a kromě toho ještě přehrává video z SD karty na monitoru připojeném přes HDMI. Během toho všeho je možné aplikaci ovládat na dotykovém displeji a tím měnit chování nejen robotické ruky, ale i celé aplikace. Finální podoba demonstrační aplikace je zachycena na obrázku 6 a obrázku 7.

Obr. 6: Sestava hrající „Člověče nezlob se!“

Obr. 7: Pohled na řídicí desku
Video
[embedyt] http://www.youtube.com/watch?v=uMYskcABVrA[/embedyt]
Zdroje
http://www.freescale.com/webapp/sps/site/prod_summary.jsp?code=RDIMX6SABREBRD
http://www.freescale.com/webapp/sps/site/prod_summary.jsp?code=i.MX6Q
Autoři
Vilém Závodný a Jiří Kotzian, MPU Rožnov, Freescale
Freescale a logo Freescale jsou ochranné známky společnosti Freescale Semiconductor, Inc., Reg. U.S. Pat. & Tm. Off. Všechny ostatní názvy jsou majetkem jejich vlastníků. ARM a Cortex jsou ochranné známky společnosti ARM Ltd. © 2014 Freescale Semiconductor, Inc
Poznámka:
Publikováno i na serveru www.hw.cz – http://www.hw.cz/konstrukce/imx6q-v-praxi-roboticka-ruka-hraje-clovece-nezlob-se.html
Podobné články
 Bezdrátově řízený model vozidla 2
Bezdrátově řízený model vozidla 2
 Přejděte na vyšší level a nechejte své modelové kolejiště ovládat počítač! Jak s tím začít a co všechno potřebujeme?
Přejděte na vyšší level a nechejte své modelové kolejiště ovládat počítač! Jak s tím začít a co všechno potřebujeme?
 Přestavník pro výhybky snadno a levně
Přestavník pro výhybky snadno a levně
 Pohodlnost nadevše! Programovatelný pokojový termostat s webovým rozhraním.
Pohodlnost nadevše! Programovatelný pokojový termostat s webovým rozhraním.
 Vývoj ESP32 nebyl nikdy jednodušší – vývojová platforma M5Stack přináší kompletní řešení i s krabičkou a jako bonus si můžete zahrát Super Maria!
Vývoj ESP32 nebyl nikdy jednodušší – vývojová platforma M5Stack přináší kompletní řešení i s krabičkou a jako bonus si můžete zahrát Super Maria!
 UART (USART) – komunikujte sériově po dvou vodičích
UART (USART) – komunikujte sériově po dvou vodičích
 WiFi ESP32 začínáme snadno a rychle (aplikace s AT příkazy)
WiFi ESP32 začínáme snadno a rychle (aplikace s AT příkazy)
 Hledáte levné a jednoduché řešení bezdrátového přenosu dat? Zvolte bluetooth BTM-112!
Hledáte levné a jednoduché řešení bezdrátového přenosu dat? Zvolte bluetooth BTM-112!
 Levný a jednoduchý DCC dekodér pro osvětlení modelových domečků
Levný a jednoduchý DCC dekodér pro osvětlení modelových domečků
 Postavte si ovládací panel i na digitálním kolejišti – s TCO a centrálou TCS to zvládnete během několika minut!
Postavte si ovládací panel i na digitálním kolejišti – s TCO a centrálou TCS to zvládnete během několika minut!
 Vývojový kit s modulem GPS L30
Vývojový kit s modulem GPS L30
 Nevstávejte z křesla a ovládejte třeba tabletem! Webový server s mikrokontrolérem Atmel a realizace termostatu.
Nevstávejte z křesla a ovládejte třeba tabletem! Webový server s mikrokontrolérem Atmel a realizace termostatu.